Interrupteur de fin de course à piston à goupille étanche

-

Boîtier robuste
-

Action fiable
-

Vie améliorée
Description du produit
Les interrupteurs de fin de course miniatures de la série RL8 de Renew offrent une durabilité et une résistance accrues aux environnements difficiles, avec une durée de vie mécanique pouvant atteindre 10 millions de cycles. Ils sont ainsi parfaitement adaptés aux applications critiques et exigeantes où les interrupteurs classiques ne peuvent être utilisés. Ces interrupteurs sont dotés d'un boîtier divisé, composé d'un corps en alliage de zinc moulé sous pression et d'un couvercle en thermoplastique. Ce dernier est amovible pour faciliter l'accès et l'installation. Leur conception compacte permet leur utilisation dans des espaces de montage restreints.
Dimensions et caractéristiques de fonctionnement
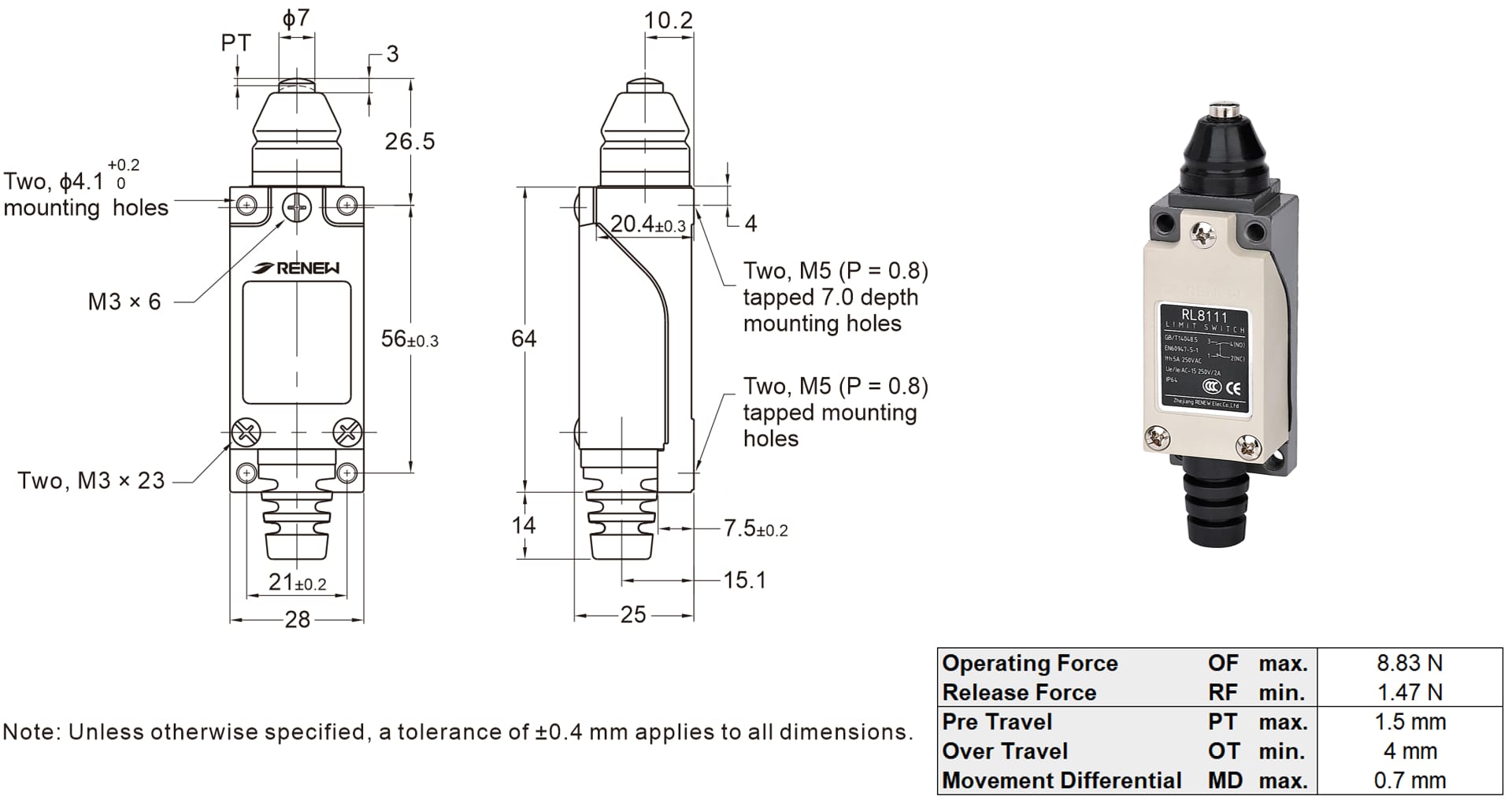
Données techniques générales
| Calibre en ampères | 5 A, 250 V CA |
| résistance d'isolation | 100 MΩ min. (à 500 V CC) |
| résistance de contact | 25 mΩ max. (valeur initiale) |
| rigidité diélectrique | Entre contacts de même polarité 1 000 V CA, 50/60 Hz pendant 1 min |
| Entre les parties métalliques conductrices et la terre, et entre chaque borne et les parties métalliques non conductrices 2 000 V CA, 50/60 Hz pendant 1 min | |
| Résistance aux vibrations en cas de dysfonctionnement | 10 à 55 Hz, amplitude double de 1,5 mm (dysfonctionnement : 1 ms max.) |
| Durée de vie mécanique | 10 000 000 opérations min. (120 opérations/min) |
| Durée de vie électrique | 300 000 opérations min. (sous la charge de résistance nominale) |
| Degré de protection | Usage général : IP64 |
Application
Les interrupteurs de fin de course miniatures de Renew jouent un rôle essentiel pour garantir la sécurité, la précision et la fiabilité de nombreux appareils dans divers secteurs. Voici quelques applications courantes ou potentielles.
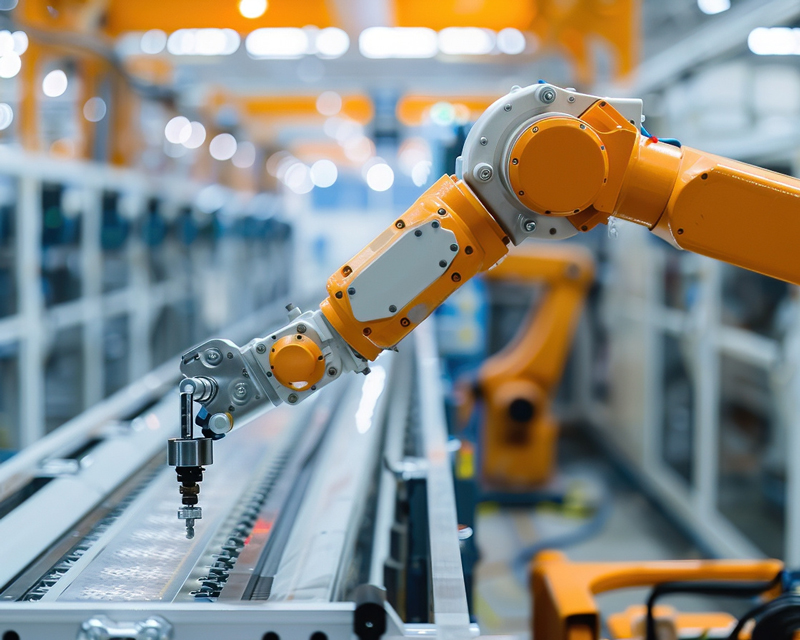
Robotique et chaînes de montage automatisées
En robotique, ces interrupteurs servent à déterminer la position des bras robotisés. Par exemple, un interrupteur de fin de course à plongeur étanche détecte lorsqu'un bras robotisé atteint sa butée et envoie un signal au système de commande pour arrêter le mouvement ou inverser sa direction, garantissant ainsi un contrôle précis et prévenant les dommages mécaniques.
Catégories de produits
-

Interrupteur de base à levier à charnière courte
-

Interrupteur de base à levier à galet à charnière courte
-

Piston à contact maintenu / montage sur panneau / Tand...
-

Interrupteur de base à levier de charnière
-

Interrupteur miniature basique à piston à broche
-

Interrupteur de fin de course oscillant à bobine à embout plastique







