Interrupteur de fin de course horizontal à levier de charnière

-

Boîtier robuste
-

Action fiable
-

Vie améliorée
Description du produit
Les interrupteurs de fin de course horizontaux de la série RL7 de Renew sont conçus pour une durabilité et une résistance accrues aux environnements difficiles, avec une durée de vie mécanique allant jusqu'à 10 millions de cycles. Ils sont ainsi parfaitement adaptés aux applications critiques et exigeantes où les interrupteurs classiques ne peuvent être utilisés. L'interrupteur à levier articulé offre une portée étendue et une grande flexibilité d'actionnement, facilitant son activation. Il est idéal pour les applications où les contraintes d'espace ou les angles difficiles rendent l'actionnement direct complexe.
Dimensions et caractéristiques de fonctionnement
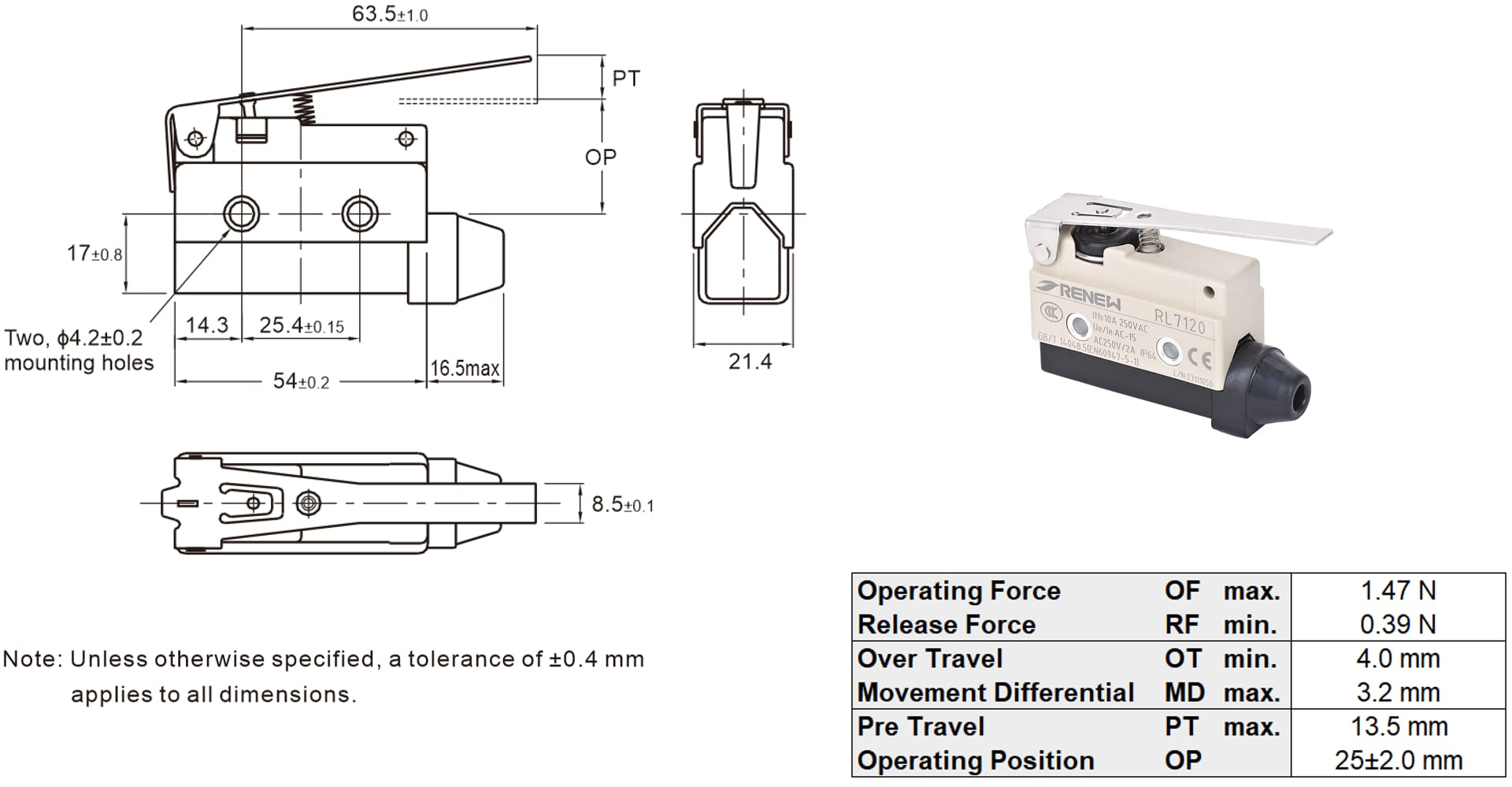
Données techniques générales
| Calibre en ampères | 10 A, 250 V CA |
| résistance d'isolation | 100 MΩ min. (à 500 V CC) |
| résistance de contact | 15 mΩ max. (valeur initiale de l'interrupteur intégré lorsqu'il est testé seul) |
| rigidité diélectrique | Entre contacts de même polarité 1 000 V CA, 50/60 Hz pendant 1 min |
| Entre les parties métalliques conductrices et la terre, et entre chaque borne et les parties métalliques non conductrices 2 000 V CA, 50/60 Hz pendant 1 min | |
| Résistance aux vibrations en cas de dysfonctionnement | 10 à 55 Hz, amplitude double de 1,5 mm (dysfonctionnement : 1 ms max.) |
| Durée de vie mécanique | 10 000 000 opérations min. (50 opérations/min) |
| Durée de vie électrique | 200 000 opérations min. (sous la charge de résistance nominale, 20 opérations/min) |
| Degré de protection | Usage général : IP64 |
Application
Les interrupteurs de fin de course horizontaux de Renew jouent un rôle essentiel pour garantir la sécurité, la précision et la fiabilité de divers appareils dans différents domaines. Voici quelques applications courantes ou potentielles.
Bras et pinces robotiques articulés
Intégrés aux pinces du poignet du bras robotique pour détecter la pression de préhension et éviter l'extension excessive, ainsi qu'intégrés aux bras robotiques articulés pour une utilisation dans les ensembles de commande et fournir un guidage de fin de course et de type grille.
Catégories de produits
-

Interrupteur de base à piston à rouleau pour montage sur panneau
-

Interrupteur de fin de course horizontal à levier court à charnière
-

Interrupteur de fin de course horizontal à piston à ressort court
-

Interrupteur de fin de course à piston à rouleau étanche
-

Interrupteur de fin de course à oscillation de la bobine à pointe de fil
-

Interrupteur de base à levier à galet de charnière







